代码拉取完成,页面将自动刷新
确定同步?
同步操作将从 低调loser/LIDAR-Multi-Object-Tracking 强制同步,此操作会覆盖自 Fork 仓库以来所做的任何修改,且无法恢复!!!
确定后同步将在后台操作,完成时将刷新页面,请耐心等待。
克隆/下载
提示
下载代码请复制以下命令到终端执行
为确保你提交的代码身份被 Gitee 正确识别,请执行以下命令完成配置
使用 HTTPS 协议时,命令行会出现如下账号密码验证步骤。基于安全考虑,Gitee 建议 配置并使用私人令牌 替代登录密码进行克隆、推送等操作
Username for 'https://gitee.com': userName
Password for 'https://userName@gitee.com':
#
私人令牌
Loading...
3D-LIDAR-Multi-Object-Tracking
3D-MOT(多目标检测和追踪) 代码有详细注解 (2020 · 秋)
参考:https://github.com/k0suke-murakami/object_tracking
@双愚 , 若fork或star请注明来源
版本(建议先看kitti分支)
两文件夹介绍
此仓库的两文件夹
- object_tracking: 代码有详细注解,建议先看这个入门🎉️🎉️🎉️🎉️
- object_tracking0:原始代码(包含全部代码)
Intro
This package includes Ground Removal, Object Clustering, Bounding Box, IMM-UKF-JPDAF, Track Management and Object Classification for 3D-LIDAR multi object tracking. The idea is mainly come from this paper.
代码对应论文:3D-LIDAR Multi Object Tracking for Autonomous Driving(Master论文)
- 论文阅读笔记:https://www.yuque.com/docs/share/81734320-21d8-4b50-993a-faa6d22d513f?# 《3D-LIDAR Multi Object Tracking for Autonomous Driving(Master论文)》
- 代码分析笔记:https://www.yuque.com/huangzhongqing/hre6tf/no0h80
下面介绍用kitti数据集相关操作
Setup
Frameworks and Packages
Make sure you have the following is installed:
- ROS Kinetic
- PCL 1.7.2
- Open CV 3.2【PCL自带opencv,不用安装】
Dataset
数据集已处理好,放在百度网盘上,需要自己下载
- kitti_2011_09_26_drive_0005_synced.bag
- 链接: https://pan.baidu.com/s/1sYWHzF11RpyEW25cQ_iNGA 密码: b6pd
编译
将本仓库下的2个文件夹移动到catkin_wp/src下,然后执行下面操作
// 创建环境变量 src中运行
mkdir -p catkin_wp/src
cd catkin_wp/src
catkin_init_workspace
// 编译(需要回到工作空间catkin_wp)
cd ..
catkin_make // 产生build和devel文件夹
//设置环境变量,找到src里的功能包(每个新的shell窗口都要执行以下source devel/setup.bash)
source devel/setup.bash // 不同shell,不同哦.sh .zsh 通过设置gedit ~/.zshrc,不用每次都source
详情可参考:https://www.yuque.com/docs/share/e59d5c91-b46d-426a-9957-cd262f5fc241?# 《09.创建工作空间与功能包※※※》
修改配置文件
举例:修改输入topic和对应的frame_id(有好几处,可以全局搜索进行修改)
cd object_tracking/src/groundremove/main.cpp
#第8行 "/kitti/velo/pointcloud" --话题名(可以根据不同数据集修改topic话题名)
ros::Subscriber sub = nh.subscribe("/kitti/velo/pointcloud", 160, cloud_cb);
# 修改frame_id = "velo_link"
Start
各模块代码路径:
PLEASE make sure you load the files, src/ego_velo.txt and src/ego_yaw.txt in src/imm_ukf_jpda.cpp l68, l69
src/ego_velo.txt and src/ego_yaw.txt in src/imm_ukf_jpda.cpp l68, l69Terminal 1
roscore
Terminal 2
--loop循环paly不推荐加,tracking和上一帧有关,误差越来越大
# kitti官方 注意修改路径path
rosbag play path/kitti_2011_09_26_drive_0005_synced.bag --loop
Terminal 3
rviz

Terminal 4
# 推荐运行launch
roslaunch object_tracking test.launch
# 复杂
rosrun object_tracking ground
rosrun object_tracking cluster
rosrun object_tracking tracking
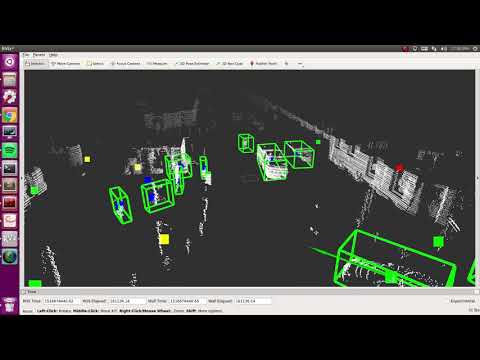
Result


Youtube Clip
License
Copyright (c) 双愚. All rights reserved.
Licensed under the MIT License.
MIT License
Copyright (c) 2020 双愚
Permission is hereby granted, free of charge, to any person obtaining a copy
of this software and associated documentation files (the "Software"), to deal
in the Software without restriction, including without limitation the rights
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
copies of the Software, and to permit persons to whom the Software is
furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in all
copies or substantial portions of the Software.
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
SOFTWARE.
举报
请认真填写举报原因,尽可能描述详细。
请选择举报类型
误判申诉
此处可能存在不合适展示的内容,页面不予展示。您可通过相关编辑功能自查并修改。
如您确认内容无涉及 不当用语 / 纯广告导流 / 暴力 / 低俗色情 / 侵权 / 盗版 / 虚假 / 无价值内容或违法国家有关法律法规的内容,可点击提交进行申诉,我们将尽快为您处理。
尝试更多
代码解读
代码找茬
代码优化