ros init bao
植保机器人边缘计算系统 1、用于测亩 2、变量喷雾 3、流量监测
Python-Mqtt用于测试服务器压力的代码,核心类可以剥离出来,使用
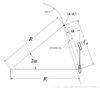
Stanley横向运动控制代码,用于无人车控制,轨迹追踪
ackermann_nav-ROS